 |
|
 |
|
|
|
It supports the integrated design, i.e. specification, validation, and implementation of the control laws (at the continuous/sampled time level) as well as the discrete-event control (at the mode switching, automaton level).
A web site presenting ORCCAD can be found at http://www.inrialpes.fr/iramr/Orccad/ including availability of the software, and more information is available from orccad@inrialpes.fr .
ORCCAD is a software environment dedicated to the design and the implementation of advanced robotics control systems. It also allows the specification and the validation of missions.
For what Classes of Applications?
ORCCAD is mainly oriented towards critical real-time applications in robotics. Here, automatic control issues are strongly connected with discrete-event aspects. Such systems are called hybrid systems .
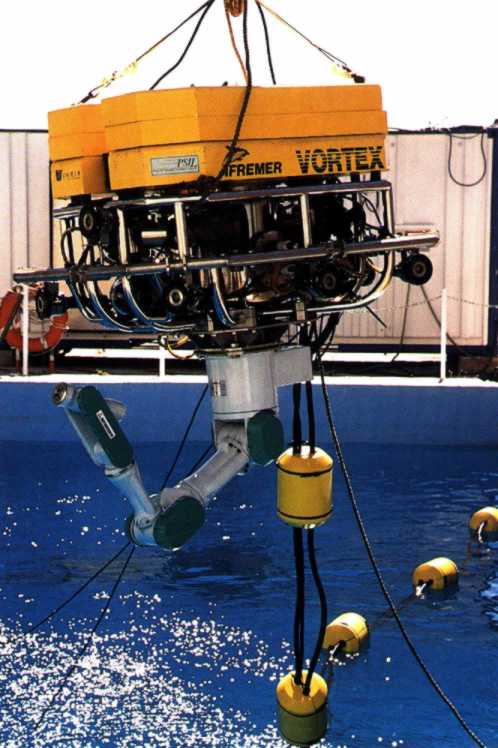
In this class of applications, ORCCAD is particularly concerned with systems which strongly interact with their environment, through several actuators and sensors. The control architecture of such systems is generally on board, and the criticality of the application is emphasized by the very high direct or indirect cost associated with a failure: since it is difficult or even impossible to physically intervene on a long range automatic underwater vehicle, or on an autonomous rover working on a contaminated site, it is necessary to minimize a priori the risk of non achievement of a mission. For that purpose, ORCCAD provides the user with dedicated interfaces ensuring the safety of programming, and has capabilities of validation, either by formal verification or by extensive simulation.
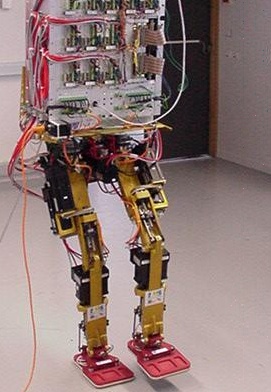
For instance, ORCCAD has been successfully used to control systems as varied as a manipulator arm, an electric vehicle, an underwater vehicle, a mobile robot with an arm and a camera, and the BIP2000 15 d.o.f. walking robot.
 |
 |
 |
| Manipulator arm: The STAUBLI RX90 arm with 6 degrees of freedom is operated by the INRIA SHARP project. | Electric cars: Experiments about automatic driving with the Cycabs are conducted by the SHARP team. | Wheeled mobile robot: The mobile robot ANIS was developed by the INRIA ICARE project. |
 |
 |
|
| Underwater systems: The VORTEX experimental remotely operated vehicle was designed by IFREMER. | Walking machine: BIP2000, a 15 d.o.f. walking robot developed by the BIP project. |
Compared to other systems dedicated to this class of applications, ORCCAD offers a coherent and full solution, from the high level specification to the generation of real-time code. It can also be customized to fulfill the requirements of a particular problem. Through dedicated interfaces, and in relation with software tools adapted to every design level, ORCCAD can be used:
ORCCAD results from several years of work by INRIA teams. It relies on well-established concepts in robotics, automatic control and computer science. It is designed for ensuring modularity and interoperability. The ORCCAD HMIs are designed using ILOG Views .
The ORCCAD kernel, which is realized along an object-oriented approach uses and/or can be connected to various software tools:
Originally, ORCCAD was designed by researchers from the INRIA ICARE project and from ISIA, with the support of Aleph Technology Company and the French Department of Research. Applications in underwater robotics were conducted with IFREMER. The INRIA BIP project, in collaboration with the PRAXITELE project contributed to the achievement of automatic driving experiments. Current developments are performed jointly by the BIP project and the Robotics Department of INRIA Rhône-Alpes. A collaboration with the SYNDEX system, from the INRIA SOSSO project, is made in the TOLERE joint research project.
ORCCAD_TOOLS V3.1 is available through orccad@inrialpes.fr. This version allows the designer to define elementary actions (Robot Task) and their composition (Robot Procedure) using the ESTEREL language.
It includes the major part of the ORCCAD features which are described in the papers, the most advanced ones are still under development. The current version allows safe installing and running for a reasonably wide class of real-time applications.
The real time code C++/VxWorks generated is a single rate, single processor. This means that the algorithm code of an elementary action is executed on a single real-time task on a single processor.
Current hosts are Solaris and Linux. Targets are VxWorks for hard
real-time, and Solaris and Linux for soft real-time.
Ongoing improvements of ORCCAD tools include: