
















Collaborative and distributed control in networked systems
Carlos Canudas de Wit
![]()
Federica Garin ![]()
Ruggero Fabbiano ![]()
Consensus of heterogeneous multi-agent systems
A new consensus algorithm for heterogeneous multi-agent systems is provided, proposing a control strategy based on a consensus algorithm which is decoupled from the original systems; consequently, its major advantage remains in the separation of the stability analysis of each subsystem and the distributed control algorithm. It is shown that our method allows using classical distributed consensus algorithms such as simple integrator consensus (with or without delay) and distributed consensus filter algorithms, and, for many multi-robot applications, it is interesting to impose a particular configuration for the robotic agents. We discusse the design and analysis of a distributed algorithm for the compact deployment of agents, where the behavior of each vehicle is only dependent on local information; the objective is to achieve the most compact formation possible and, to solve this problem, we propose, in a first step, two uncorrelated controllers: one designed for dispersion with connectivity maintenance, and a second designed to minimize inter-agent angles. An improved controller including variable gains, particularly designed to avoid singular configurations, is also provided. Lastly, we propose a sequential strategy composed of the two previously mentioned controllers and a stability analysis based on hybrid systems theory.
Source localization
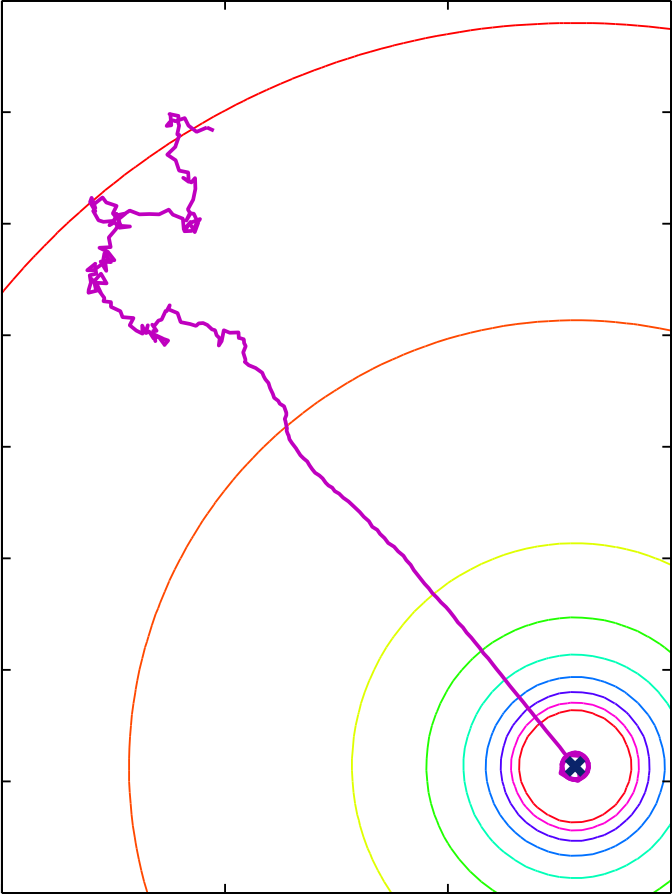
Bi-dimensional projection of a 3D source-seeking simulation for an isotropic diffusion process
The problem of source localization consists in finding, by one or several agents eventually cooperating each other, the point or the spatial region from which a quantity of interest is being emitted. Source-seeking agents can be fixed sensors, that collect and exchange some information about the signal field and try to identify the position of the source (or the smallest region in which it is included), or moving devices equipped with one or more sensors, that phisically reach the source in an individual or cooperative way. This research area is attracting a rapidly increasing interest, in particular in applications where the agents have limited or no position information and GPS navigation is not available, as in underwater navigation or in cave exploration: for instance, source localization is relevant to many applications of vapor emitting sources such as explosive detection, drug detection, sensing leakage or hazardous chemicals, pollution sensing and environmental studies. Other fields of interest are sound source localization, heat source localization and vent sources in underwater field. Techniques present in literature either are based on a specific knowledge of the solution of the diffusion process, or make use of an extremum-seeking approach, exciting the system with a periodic signal so as to explore the field and collect enough information to reconstruct the gradient of the quantity of interest. Our approach lies in the computation of derivatives (potentially of any order) from Poisson integrals that, for isotropic diffusive source in steady-state, whose solution satisfies the Laplace equation, allows for a gradient search with a small computation load (derivatives are computed by integrals) and without requiring any knowledge of the closed-form solution, avoiding in the same time extremum-seeking oscillations; this has the additional advantage of an intrinsic high-frequency filtering, that makes the method low sensitive to measurement noise.
Distributed real-time simulation of numerical models
Vehicles and powertrains are complex systems where different domains are involved. The need of quick innovation in the automotive domain made simulation necessary at early stages of the development cycle, and representative phenomenological models of powertrains have been developed and have been used in the design phase under domain dedicated tools. However, their use for controls validation using model-in-the-loop (MIL) and hardware-in-the-loop (HIL) was prevented due to performance limitation of widely used single-solver/single-core simulation approaches. Multicore simulation for complex systems has been studied with a focus on simulation duration speedup, and the methodology of parallelization across the model has been selected for such problem where strong interactions between the model components are observed. The current study showed that decoupling the model parts by relaxing their data dependencies is promising in term of simulation speed (by increasing the parallelism) and results accuracy; besides, test results on engine model showed that, with the model partitioning, it is possible to use efficiently variable-step solvers thanks to the decrease of the number of discontinuities, so the number of integration interrupts, in each subsystem. Further work will investigate the combination of the use of variable-step solvers in split model with the use of multicore architecture for parallel computing, in order to improve the simulation speedup while keeping results accuracy under control.
Selected papers
- R. Fabbiano, C. Canudas de Wit, F. Garin, Distributed source localisation with no position information, EUCA 13th European Control Conference, 2014.
- R. Fabbiano, C. Canudas de Wit, F. Garin, Source localization by gradient estimation based on Poisson integral, Automatica, 2014.
- G. Rodrigues de Campos, L. Briñón arranz, A. Seuret and S. I. Niculescu, On the consensus of heterogeneous multi-agent systems: a decoupling approach, 3rd IFAC Workshop on Distributed Estimation and Control in Networked Systems, 2012.
- L. Briñón Arranz, A. Seuret and C. Canudas De Wit, Collaborative estimation of gradient direction by a formation of AUVs under communication constraints, IEEE 50th Conference on Decision and Control and European Control Conference, 2011.
- Gabriel Rodrigues de Campos and A. Seuret, Improved consensus algorithms using memory effects, IEEE 50th Conference on Decision and Control and European Control Conference, 2011.
- L. Briñón Arranz, A. Seuret and C. Canudas de Wit, Elastic formation control based on affine transformations, American Control Conference, 2011.
- G. Rodrigues de Campos and A. Seuret, Continuous-time double integrator consensus algorithms improved by an appropriate sampling, 2nd IFAC Workshop on Distributed Estimation and Control in Networked Systems, 2010.
- B. Moore and C. Canudas de Wit, Source seeking via collaborative measurements by a circular formation of agents, American Control Conference, 2010.
- L. Briñón Arranz, A. Seuret and C. Canudas de Wit, Contraction control of a fleet circular formation of AUVs under finite communication range, American Control Conference, 2010.
- L. Briñón Arranz, A. Seuret and C. Canudas de Wit, Translation control of a fleet circular formation of AUVs under finite communication range, IEEE 48th Conference on Decision and Control and 28th Chinese Control Conference, 2009.
- A. Seuret, D. V. Dimarogonas and K. H. Johansson, Consensus under communication delays, IEEE 47th Conference on Decision and Control, 2008.
![]() Go to the full list of publications
Go to the full list of publications
