
















Past projects
HYCON 2
Meeting reports:
January 2012 
May 2011
Parters: Università degli studi di Pavia (Italy), Technische universiteit Delft (Netherlands), Universidad de Sevilla (Spain), Università degli studi dell'Aquila (Italy), Istituto per le applicazioni del calcolo Mauro Picone, Consiglio nazionale delle ricerche (Rome, Italy), KTH Royal institute of technology (Stockohlm, Sweden), Università degli studi di Genova (Italy)Contact: Carlos Canudas de Wit ![]()
PhD students: Fabio Morbidi (postDoc); Luis León Ojeda, Dominik Pisarski
Official website: HYCON 2
Presentation of the project
 Highly-complex and networked control systems aims at stimulating and establishing the long-term integration of the European research community, leading institutions and industry in the strategic field of control of complex, large-scale, and networked dynamical systems. It interconnects scattered groups to create critical mass and complementarity, and provides the necessary visibility and communication with the European industries. HYCON 2 has identified several applications domains to motivate, integrate, and evaluate research in networked control. These domains are transportation, energy, and biological and medical systems.
Highly-complex and networked control systems aims at stimulating and establishing the long-term integration of the European research community, leading institutions and industry in the strategic field of control of complex, large-scale, and networked dynamical systems. It interconnects scattered groups to create critical mass and complementarity, and provides the necessary visibility and communication with the European industries. HYCON 2 has identified several applications domains to motivate, integrate, and evaluate research in networked control. These domains are transportation, energy, and biological and medical systems.
In HYCON 2 benchmarking serves as a tool for testing and evaluating the developed technologies, for stimulating and enforcing excellence by the identification and adoption of best practices. Our team has been assigned to develop a traffic show-case application corresponding to Benchmark 5, which major purpose is to provide a rich set of field traffic data to the control community in order to taste control technologies of networked hybrid systems in large-scale, real-world problems.
The showcase
The showcase corresponds to the operation of the freeway network around the Grenoble area. The selected road is the Grenoble south ring, or la rocade sud (as its French name), the name given to the important national freeway 87 that links the city of Grenoble in the south-west to north-east inner path. With a length of 10.5 kilometers, 11 inputs and 10 outputs, it connects A480 to A41, becoming an essential medium of connection in the city.
In order to model the Grenoble south ring, the integrated transport modeling software Aimsun was implemented; this software is widely used by government agencies, municipalities, universities and consultants for traffic engineering and simulations, transportation planning and emergency evacuation studies. The main challenge here is to tune all the software parameters in order to get considerably realistic scenarios.
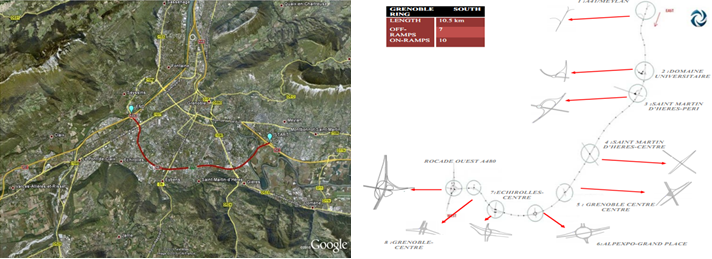
The Grenoble south ring (left: Google Earth; right: Aimsun)
Reached goals
The reached goals for the first year activity on this study case are:
- Definition of the road network topology (definition of number of input/output ramps, road sector to be concerned by the study).
- Sensor placement; location of sensors and definition of the necessary number of them.
- Actuators selection; selection of input ramps useful for ramp metering, and characterization of their storage capacity; selection of points to be controlled by VSL.
- Development of the micro-simulator in Aimsun; this includes: building the network architecture, building the APIs for sensors and actuators; the calibration of a microscopic simulator from macroscopic data (this last point was possible due to the set of field data obtained from the Grenoble traffic authorities).
- Micro-simulator tuning; this includes to run the simulator to get the characteristic curves of each cell of the CTM model. This interface, as well as Aimsun and Matlab, is remotely reachable, to let our partners in HYCON 2 test their work.
Recently done
- Development of an interface that allows Aimsun and Matlab to communicate; it is now possible to tune Aimsun thanks to inputs provided by algorithms that run in Matlab.
- We developed a web-based remote architecture so that simulations can be carried out remotely; control and estimation algorithms can be implemented remotely using our Matlab interface with Aimsun.


Seminar
Delft, October 20, 2011
- HYCON 2 showcase: summary of advances on the show case. Simulation, demo and discussion — Carlos Canudas de Wit
- Traffic observer design: some validation results — Carlos Canudas de Wit, Luis León
- Evaluation of platooning in real traffic conditions — Jonas Mårtensson
- Traffic identification and control — Antonella Ferrara
- Modelling and optimization of transportation systems: some activities at the university of Genova — Simona Sacone
- A fluid dynamic approach for traffic forecast from mobile sensor data — Emiliano Cristiani, Corrado De Fabritiis, Benedetto Piccoli
- Analysis and design of equilibrium points for the cell-transmission traffic model — Dominik Pisarski, Carlos Canudas de Wit
- A new ant colony routing approach with a trade-off between system and user optimum — Zhe Cong
- Traffic control using the macroscopic fundametal diagram — Victor Knoop
Scenarios
One of the main objectives of our work in HYCON 2 is to unify the showcase so as that all the groups involved in HYCON 2 project can adopt the same data obtained by the Grenoble south ring designed on Aimsun. This is possible because having achieved the microscopic tuning of GSR, we are able to provide different data coming from two scenarios, distinguished by two different criteria: one is the different demand on a specific point on the freeway, which actually affects the congestion profile inside of this; the second corresponds to the cell division on the entire freeway. The goal for this different platforms is to see if the validation can be properly achieved with the different models adopted (first- or second-order model). These scenarios have been accomplished thanks to the help of Master students, PhD students, engineers and researchers located at Inria Rhône-Alpes, NeCS team.
As presented in the HYCON 2 deliverable, the GSR was divided in 62 cells, composed by 17 nodes plus 45 homogeneous cells. Simulations have been executed during 24 hours, during which velocities and flows have been captured on every cell; every 8 seconds Aimsun sent data to Matlab, which stored them through the API. Finally Excel files velocity.xls and flows.xls, that include these data, were created.
For WP5, we present different scenarios that illustrate different traffic situations on the Grenoble south ring (GSR). A scenario is given through three files: a flows file, a velocities file, and an architecture file.
- Flows and velocities files have timesteps in rows and sensors in columns; both have 10800 lines (a 24-hour simulation, that means 86400 seconds, with informations sent by Aimsun every 8 seconds, which gives us 10800 iterations) and 107 columns (2 sensors per cell, plus a sensor each on- and off-ramp: 2×45+17 columns).
- The architecture file gives the topology of the GSR representation, that means, how sensors are organized in cells and nodes.
Description of the sensors' placement
 The picture shows two nodes (one in-ramp and one off-ramp) and a cell; each node has 3 sensors, ordered in the way they are numbered in the picture. One cell contains 2 sensors, one for its entry and one for its exit; the sensor at the entry of one cell is the same as the exit one of the previous cell or node (in the same way, exit sensor of a cell is the same one as the entry sensor for the next cell or node).
The picture shows two nodes (one in-ramp and one off-ramp) and a cell; each node has 3 sensors, ordered in the way they are numbered in the picture. One cell contains 2 sensors, one for its entry and one for its exit; the sensor at the entry of one cell is the same as the exit one of the previous cell or node (in the same way, exit sensor of a cell is the same one as the entry sensor for the next cell or node).
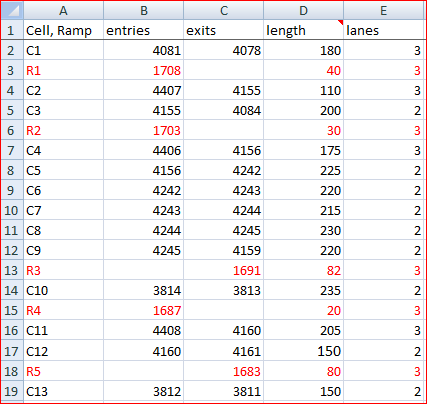 Cell_and_nodes.xls is organized as described in the previous paragraph. The file has 5 columns and 62 input lines.
Cell_and_nodes.xls is organized as described in the previous paragraph. The file has 5 columns and 62 input lines.
- the first column indicates whether we have a ramp or a cell.
- The second one indicates the entrance sensor's id. in Aimsun, whereas the third indicates the exit sensor's id. of a cell. In the case of a ramp, having a value in the second column tells us we have an on-ramp, and having a value in the third column tells us we have an off-ramp.
- The fourth column indicates the length of a cell or node; in case of a cell, it is just the distance between the entry and the exit senors, while in case of a node, it is the distance between the ramp's sensor and the entry sensor of the next cell.
- The fifth column shows the number of lanes the cell or ramp contains.
NB: you may observe that when two cells follow each other, sensors' id.s are the same in the junction; in a more general way, you should not need to worry about id.s, they are just here to ease the reading.
Available files
- Flows — poor congestion
- Velocities — poor congestion
- Flows — high congestion
- Velocities — high congestion
- Cells and nodes Excel file
These files need granted access to be downloaded
© Copyrighted free use provided you mention the HYCON 2 project
MOCoPo
Partners:
Institut français des sciences et technologies des transports, de l'aménagement et des réseaux (IFSTTAR),
Centre d'enseignement et de recherche en environnement atmosphérique (CEREA),
Laboratoire régional des ponts et chaussées d'Angers,
Association pour le contrôle et la prévention de l'air dans la région grenobloise (AsCoPARG),
Centre d'études sur les réseaux, les transports, l'urbanisme et les constructions publiques (CERTU),
Direction interdépartementale des routes — centre est (DIR-CE)
Contact:
Carlos Canudas de Wit ![]() , Alain Kibangou
, Alain Kibangou ![]()
PhD student: Fabio Morbidi (postDoc); Luis León Ojeda
Official website: MOCoPo
The MOCoPo project (Measuring and modelling traffic congestion and pollution) is funded by the French ministry in charge of transport (MEDDTL), through the PREDIT (Research and innovation in land transport program). The project began in January 2011 and will end in December 2013; various research institutes and universities, some teams of the MEDDTL and pollution measurements associations are involved in the project: LICIT (Transport and traffic engineering laboratory, joint unit of IFSTTAR and ENTPE), LTE (Transports and environment laboratory, IFSTTAR), LEPSIS (Laboratory for road operations, perception, simulators and simulations, IFSTTAR), IM (Infrastructures and mobility department, IFSTTAR), MACS (Monitoring, assessment, computational sciences, IFSTTAR), Atmo Rhône-Alpes, DIR-CE (Center-east direction of roads), LRPC Angers (Regional laboratory of Angers), CERTU (Center for cities and urban transportation), and CEREA (Center of teaching and research in atmospheric environment, laboratory École des Ponts ParisTech / EDF research and development). NeCS is particularly involved in tasks devoted to travel time estimation and prediction; on this purpose one post-doc (Fabio Morbidi) has been hired.
Selected papers
- L. León Ojeda, A. Y. Kibangou and and C. Canudas de Wit, Online dynamic travel-time prediction using speed and flow measurements, European Control Conference, 2013.
- L. León Ojeda, A. Y. Kibangou and and C. Canudas de Wit, Adaptive Kalman filtering for multi-step ahead traffic flow prediction, American Control Conference, 2013.
- C. Canudas de Wit, L. León Ojeda and A. Y. Kibangou, Graph constrained-CTM observer design for the Grenoble south ring, submitted to 13rd IFAC Symposium on Control in Transportation Systems, 2012.
![]() Go to the full list of publications
Go to the full list of publications
VolHand
Partners: University of Valenciennes et of the Hainaut-Cambrésis (France), CHRU de Lille (France), Fondation Hopale (Berck-sur-mer, France), INRETS — LIVIC, LESCOT, LEMCO (France), JTEKT (Japan)
Contacts: Carlos Canudas de Wit , Jonathan Dumon
PhD student: Valentina Ciarla
Official website: VolHand
The VolHand project (Volant pour personne âgée et/ou handicapée) is a multi-disciplinary project with the goal to develop a new generation of electronic power assistance steering (EPAS) systems for disabled people. The main idea is to design a steering assistance that can be adapted to a wide population of disabled people. This project is funded by the Agence Nationale de la Recherche (ANR) within the research field VTT (véhicule pour les transports terrestres) 2009; the project started on October 1, 2009, and will last for 42 months.

The work has the goal to develop a general methodology to adapt the current technology for disabled people, by introducing additional blocks that can be implemented via software without altering the hardware of the vehicle. In this way, it can be easily exported without additional costs in terms of design and technology for the industrial partner. The methodology has been studied theoretically, joining control aspects with biomechanical ones; moreover, the theoretical study has been tested in laboratory on the hardware in the loop setup: a real steering wheel is linked to a real time PC-unit and to an electrical motor. A graphical user interface has been implemented to facilitate the access to the software. The last part of the study will consist into the experimental validation of the methodology with a teleoperated vehicle, the NeCSCar. This vehicle will provide the measure of the friction torque to the PC-unit, allowing us to simulate a real driving situation.
Selected papers
- V. Ciarla, V. Cahouet, C. Canudas de Wit and F. Quaine, Genesis of booster curves in electric power assistance steering systems, 15th IEEE Intelligent Transportation Systems Conference, 2012.
- J. Tordesillas, V. Ciarla and C. Canudas de Wit, Oscillation annealing and driver/tire load torque estimation in electric power steering systems, IEEE Multi-Conference on Systems and Control, 2011.
![]() Go to the full list of publications
Go to the full list of publications
FeedNetBack
![]() Contact: Carlos Canudas de Wit
Contact: Carlos Canudas de Wit ![]()
PhD students: Lara Briñón Arranz, Émilie Roche, Nicolas Cardoso de Castro, Gabriel Rodrigues de Campos
Official website: FeedNetBack
Final report
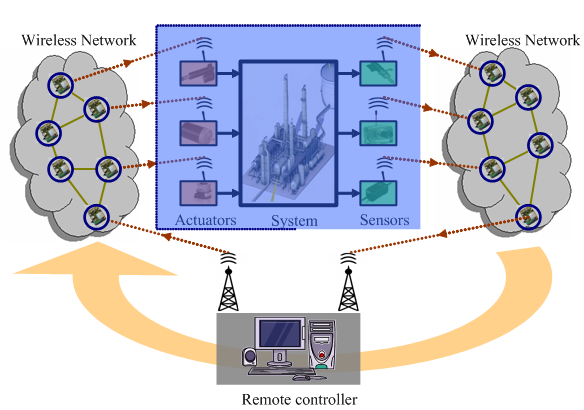 FeedNetBack is a recently concluded EU STREP project from the second call of the FP7, ICT-2007.3.7 networked embedded and control systems; the project involved 10 partners, and addressed innovative problems of control co-design in systems interconnected via wireless networks. The objective of the FeedNetBack project is to precisely generate a co-design framework, to integrate architectural constraints and performance trade-offs from control, communication, computation, complexity and energy management. This will allow the development of more efficient, robust and affordable networked control technologies that scale and adapt with changing application demands. By focusing on wirelessly connected networks, we study networked control from a fundamental point of view; we extend the current scientific state of the art in networked control and develop a software tool set to support our co-design framework.
FeedNetBack is a recently concluded EU STREP project from the second call of the FP7, ICT-2007.3.7 networked embedded and control systems; the project involved 10 partners, and addressed innovative problems of control co-design in systems interconnected via wireless networks. The objective of the FeedNetBack project is to precisely generate a co-design framework, to integrate architectural constraints and performance trade-offs from control, communication, computation, complexity and energy management. This will allow the development of more efficient, robust and affordable networked control technologies that scale and adapt with changing application demands. By focusing on wirelessly connected networks, we study networked control from a fundamental point of view; we extend the current scientific state of the art in networked control and develop a software tool set to support our co-design framework.
ConNeCt — Control of networked cooperative systems
Partners: ANR (Paris, France), IFREMer (France), PGES (Meylan, France), Prolexia (La-Seyne-sur-mer, France)
Contact: Carlos Canudas de Wit ![]()
Official website: ConNeCt
 ConNeCt is a project funded by the ANR (National Research Agency); the project deals with the problem of controlling multi-agent systems, i.e., systems composed of several sub-systems interconnected by an heterogeneous communication network. The main challenge here is to learn how to design controllers accounting for constraints on the network topology, but also on the possibility to share computational resources during the system operation while preserving closed-loop system stability. The control of a cluster of agents composed of autonomous underwater vehicles, and marine surface vessels, will be used as a support example all along the proposal.
ConNeCt is a project funded by the ANR (National Research Agency); the project deals with the problem of controlling multi-agent systems, i.e., systems composed of several sub-systems interconnected by an heterogeneous communication network. The main challenge here is to learn how to design controllers accounting for constraints on the network topology, but also on the possibility to share computational resources during the system operation while preserving closed-loop system stability. The control of a cluster of agents composed of autonomous underwater vehicles, and marine surface vessels, will be used as a support example all along the proposal.
ARAVIS — Architecture reconfigurable et asynchrone intégrée sur puce
Partners: Minalogic pole (Grenoble), ST Microelectronics (Geneva, Switzerland), Orange R&D (Paris, France), CEA-Leti (Grenoble), TIMA laboratory (Grenoble), Sardes team
Contact: Carlos Canudas de Wit ![]()
PhD students: Carolina Albea Sánchez, Sylvain Durand
 ARAVIS is a project sponsored by the Minalogic Pole, started for 3 years in October 2007. It will investigate innovative solutions needed by the integration of 32 nano-meter scale future chips; it is headed by ST Microelectronics, and the other partners are Orange R&D, CEA-Leti, Laboratoire TIMA and the Sardes team at Inria. The NeCS team is involved in the ARAVIS project to work on issues on optimal energy management of SoC: it appears that introducing control loops at different levels of these chips, it will be necessary to be compliant with heterogeneous circuits and their optimally-energy operation.
ARAVIS is a project sponsored by the Minalogic Pole, started for 3 years in October 2007. It will investigate innovative solutions needed by the integration of 32 nano-meter scale future chips; it is headed by ST Microelectronics, and the other partners are Orange R&D, CEA-Leti, Laboratoire TIMA and the Sardes team at Inria. The NeCS team is involved in the ARAVIS project to work on issues on optimal energy management of SoC: it appears that introducing control loops at different levels of these chips, it will be necessary to be compliant with heterogeneous circuits and their optimally-energy operation.
Observers design for multi-sensor systems: application to HDI engines
Partner: IFP (Rueil-Malmaison, France)
Contact: Carlos Canudas de Wit ![]()
PhD student: Riccardo Ceccarelli
 Accompanying contract with IFP (Institut Français du Petrole), in the framework of the CIFRE PhD grant of Riccardo Ceccarelli. The goal sought with the Control Engine dept. of IFP is the development of a model-based multi-sensor observer design allowing to identify several types of engine failures like: gas leakage in the low and high pressure recirculation circuits, ill functioning of some of the sensors, and actuators (valves). In particular, homogeneous charge compression ignition engines (HCCI) are considered for this work.
Accompanying contract with IFP (Institut Français du Petrole), in the framework of the CIFRE PhD grant of Riccardo Ceccarelli. The goal sought with the Control Engine dept. of IFP is the development of a model-based multi-sensor observer design allowing to identify several types of engine failures like: gas leakage in the low and high pressure recirculation circuits, ill functioning of some of the sensors, and actuators (valves). In particular, homogeneous charge compression ignition engines (HCCI) are considered for this work.
SPEEDD
![]() Partners: Demokritos (Agia Paraskevi, Greece), IBM — Israel (Haifa, Israel), ETH (Zürich, Switzerland), Technion (Haifa, Israel), University of Birmingham (England), Feedzai (Coimbra, Portugal)
Partners: Demokritos (Agia Paraskevi, Greece), IBM — Israel (Haifa, Israel), ETH (Zürich, Switzerland), Technion (Haifa, Israel), University of Birmingham (England), Feedzai (Coimbra, Portugal)
Contact: Carlos Canudas de Wit ![]()
PhD students: Pietro Grandinetti ![]() , Andrés A. Ladino Lopez
, Andrés A. Ladino Lopez ![]()
Official website: SPEEDD
Eliminating or mitigating an anticipated problem, or capitalizing on a forecast opportunity, can substantially improve our quality of life, and prevent environmental and economic damage. At the environmental level, changing traffic-light priority and speed limits to avoid traffic congestions will reduce carbon emissions, optimize transportation and increase the productivity of commuters. At the business level, making smart decisions ahead of time can become a differentiator leading to significant competitive advantage. For example, adding credit cards to watch lists as a result of forecasting fraud will reduce the cost inflicted by fraudulent activities on payment processing companies and merchants, and consequently lower credit card rates which can attract more customers.
SPEEDD will develop a prototype for proactive event-driven decision-making: decisions will be triggered by forecasting events — whether they correspond to problems or opportunities — instead of reacting to them once they happen. The decisions will be in real-time, in the sense that they will be taken under tight time constraints, and require on-the-fly processing of big data, that is, extremely large amounts of noisy data flooding in from different geographical locations, as well as historical data. In credit card fraud management, for example, it is necessary to forecast and act upon fraudulent activity in a matter of milliseconds, given tens of thousands of transactions per second taking place all over the world, as well as several months of historical data.
SPEEDD will develop a prototype for robust forecasting and proactive decision-making, in the sense that it will be resilient to the inherent uncertainty of big data, which include incomplete data streams, erroneous data and imprecise definitions (patterns) of the events that need to be detected and forecast. In traffic congestion forecasting and management, for instance, the data come from motorway sensors that are often out of order, not calibrated appropriately or inaccurate.
The SPEEDD methodology for proactive event-based decision-making comprises the following steps. First, big data is continuously acquired from various types of sensor and fused in order to recognise, in real-time, events of special significance. To allow for sub-second recognition, SPEEDD minimizes communication volume by moving as little data as possible from one place to another. Second, the events recognised are correlated with historical information to forecast problems and opportunities that may take place in the near future. Third, the forecast events along with the recognised events are leveraged for real-time operational decision-making. Fourth, visual analytics tools prioritise and explain possible proactive actions, enabling human operators to reach and execute the correct decision.
The novelty of SPEEDD, therefore, lies in the difficult task of on-the-fly, low-latency processing of extremely large, geographically distributed, noisy event streams and historical data, for recognising and forecasting opportunities and threats, making decisions to capitalise on the opportunities and mitigate the threats, and explaining, through user-interaction, the decisions to human operators in order to facilitate correct decision execution.
TeMP
Partners: Grupo de Pesquisa em Processamento de Sinais e Informação, Universidade Federal do Ceará (Fortaleza, Brazil)
Contact: Alain Kibangou![]()
Objectives
TeMP (tensor-based information modelling and processing) is a project funded in the framework of the French-Brazilian bilateral collaboration program (FUNCAP-INRIA); it has started in August 2011 for a duration of two years. It aims to study, analyze, propose and evaluate new models and techniques for digital communication systems using tensors and multilinear algebra tools, through in-depth theoretical analysis of mathematical models, optimization algorithms, and computational simulations. Indeed, new models should be developed for generalizing existing tensor models in order to allow for the modelling of a wider class of communication systems for more realistic propagation channels, including the cooperation among multiple nodes of a communication network (users or sensors). Due to dynamic change of parameters, tensor-based filtering algorithms need to be developed for information retrieval systems in cooperative communication; these algorithms should be distributed for avoiding network vulnerability, and for a better management of computation and storage resources.
Research actions
Distributed optimization for tensor decompositions
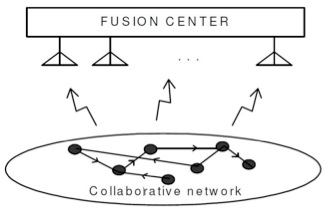
Multiple access protocols such as Time Division Multiple Access (TDMA) can induce a latency that can be damaging, for example, for control purposes; in this case, Direct-Sequence Code Division Multiple Access (DS-CDMA) is certainly well indicated. In the last decade, by exploiting several diversities, new signal processing techniques based on tensor modeling have been developed; with a very high efficiency, they allow the blind estimation of transmitted information sequences. In general, these works are devoted to communication systems with an antenna array at the receiver; however, many wireless devices are limited by size, hardware complexity or other constraints to a single antenna. The powerful tensor based methods cannot be applied for such nodes. In some recent papers, by resorting to the idea of collaborative signal processing, we have shown how estimating the channel, symbols, and codes in a distributed way when each node in the network has a single antenna. Since the received data samples can be stored in a three-way array, or a third-order tensor, retrieving the above mentioned unknown is equivalent to running tensor decomposition. We have already derived an average consensus-based distributed algorithm (D-ALS). The goal of this task is to:
- study the efficiency of D-ALS when each alternating least-squares step embeds single consensus iteration;
- derive a distributed Levenberg-Marquardt algorithm where some of the unknowns are strictly local;
- derive a distributed consensus algorithm by solving a constrained optimization problem by means of Lagrange multipliers method.
Centralized and distributed filtering approach for dynamic tensor decomposition
Tracking dynamic changes in a given variable (state) is the purpose of filtering and estimation. In the minimum variance sense, the optimal filter, for linear and Gaussian systems, is the so-called Kalman filter. Nonlinear extension of this filter has been derived through linearization (Extended Kalman Filter) or particles propagation (Unscented Kalman Filter). In general the state is given in vector form.; the advantage of using tensor decomposition for parameter estimation is to preserve structural algebraic properties of the tensor. Till now, dynamic tensor decomposition was not studied; our aim is to investigate the feasibility of dynamic tensor decomposition viewed as a filtering problem. Centralized schemes will first be studied; then, we will consider distributed ones. The following tasks will be achieved:
- blind estimation of time-varying FIR channels or systems using cumulants;
- blind PARAFAC receiver for non-stationary channels.
Tensor signal processing for cooperative communication systems
 In most of studies, the spatial dimension is explored through the use of an array of transmitting and/or reception antennas; however, it is noteworthy that in modern communication systems, constraints in physical space and processing power in devices do not always allow the use of multiple antennas. One solution currently in focus is called the cooperative coding in which mobile devices share their antennas by means of a simple encoding scheme; in this case, the spatial dimension is explored with the collaboration of various network nodes. In cooperative coding schemes, one must manage the communication protocol and the technique of processing between participating nodes; in this context, we will focus on the design of tensor-based encoding and decoding algorithms for distributed cooperative MIMO systems, which consider the aspect of asynchronous cooperative networks.
In most of studies, the spatial dimension is explored through the use of an array of transmitting and/or reception antennas; however, it is noteworthy that in modern communication systems, constraints in physical space and processing power in devices do not always allow the use of multiple antennas. One solution currently in focus is called the cooperative coding in which mobile devices share their antennas by means of a simple encoding scheme; in this case, the spatial dimension is explored with the collaboration of various network nodes. In cooperative coding schemes, one must manage the communication protocol and the technique of processing between participating nodes; in this context, we will focus on the design of tensor-based encoding and decoding algorithms for distributed cooperative MIMO systems, which consider the aspect of asynchronous cooperative networks.
Tensor based for underwater acoustic OFDM systems
The channel modeling is of paramount importance in wireless communication systems: it allows translating the physical phenomena of multipath propagation in a linear or nonlinear input and output equation summarizing the changes in the wireless environment on the transmitted signals. The problem of channel estimation is strongly linked to the modeling problem, since the knowledge of the channel structure can be exploited in estimation methods and can lead to more accurate estimators; furthermore, knowledge of the correlation structure (in the case of statistical models) or the structure of the multipath (in the case of parametric models) is crucial in signaling techniques and pre-coding in MIMO systems. In most approaches in the literature, the modeling exhibit restrictions and simplifications such as:
- propagation delay of the received signal along the antennas comprising the array is considered negligible and not included in the CP model for the multipath channel;
- a uniform and linear antenna array in which only the azimuth plane is considered for characterizing the angle of arrival of multipaths (the elevation plane is discarded);
- idealized models for the temporal variation of the multipath channel is considered;
- idealized models for power amplifiers are considered.
Our aim is to go further in the study of such systems by discarding some of unrealistic assumptions; in addition, we will also study the particular case of underwater acoustic channels where tensor approaches have not yet been considered. In the algorithmic point of view study and development of algorithms based on simultaneous matrix diagonalization for tensor decomposition will be investigated.
Selected papers
- A. L. F. De Almeida, A. Y. Kibangou, D. C. Araujo and S. Miron, Joint data and connection topology recovery in collaborative wireless sensor network, submitted to IEEE Conference on Acoustic, Speech and Signal Processing, 2013.
- A. Y. Kibangou and A. L. F. De Almeida, Distributed Khatri-Rao space-time coding and decoding for cooperative networks, 19th European Signal Processing Conference (EUSIPCO 2011), 2011.
- A. Y. Kibangou and A. L. F. De Almeida, Distributed PARAFAC based DS-CDMA blind receiver for wireless sensor networks, 11th IEEE International Workshop on Signal Processing Advances in Wireless Communications, 2010.
![]() Go to the full list of publications
Go to the full list of publications
Comfort
Official website: COMFORT
![]()
